Disk scheduling algorithms are crucial in managing how data is read from and written to a computer's hard disk. These algorithms help determine the order in which disk read and write requests are processed, significantly impacting the speed and efficiency of data access. Common disk scheduling methods include First-Come, First-Served (FCFS), Shortest Seek Time First (SSTF), SCAN, C-SCAN, LOOK, and C-LOOK. By understanding and implementing these algorithms, we can optimize system performance and ensure faster data retrieval.
- Disk scheduling is a technique operating systems use to manage the order in which disk I/O (input/output) requests are processed.
- Disk scheduling is also known as I/O Scheduling.
- The main goals of disk scheduling are to optimize the performance of disk operations, reduce the time it takes to access data and improve overall system efficiency.
Importance of Disk Scheduling in Operating System
- Multiple I/O requests may arrive by different processes and only one I/O request can be served at a time by the disk controller. Thus other I/O requests need to wait in the waiting queue and need to be scheduled.
- Two or more requests may be far from each other so this can result in greater disk arm movement.
- Hard drives are one of the slowest parts of the computer system and thus need to be accessed in an efficient manner.
Key Terms Associated with Disk Scheduling
- Seek Time: Time taken to move the disk arm to the track where data is located.
- Rotational Latency: Time taken for the desired sector to rotate under the read/write head.
- Transfer Time: Time taken to actually read or write the data, depending on disk speed and data size.
Disk Access Time = Seek Time + Rotational Latency + Transfer Time
Total Seek Time = Total head Movement * Seek Time
 Disk Access Time and Disk Response Time
Disk Access Time and Disk Response TimeDisk Response Time
- Response Time: The time a request waits before its I/O operation starts.
- Average Response Time: The mean waiting time of all requests.
- Variance in Response Time: How much individual waiting times differ from the average.
Goals of Disk Scheduling Algorithms
- Minimize Seek Time
- Maximize Throughput
- Minimize Latency
- Ensuring Fairness
- Efficiency in Resource Utilization
Disk Scheduling Algorithms
There are several Disk Several Algorithms. We will discuss in detail each one of them.
- FCFS (First Come First Serve)
- SSTF (Shortest Seek Time First)
- SCAN
- C-SCAN
- LOOK
- C-LOOK
- RSS (Random Scheduling)
- LIFO (Last-In First-Out)
- N-STEP SCAN
- F-SCAN
1. FCFS (First Come First Serve)
FCFS is the simplest of all Disk Scheduling Algorithms. In FCFS, the requests are addressed in the order they arrive in the disk queue. Let us understand this with the help of an example.
 First Come First Serve
First Come First ServeSuppose the order of request is- (82,170,43,140,24,16,190) and current position of Read/Write head is: 50
So, total overhead movement (total distance covered by the disk arm) =
(82-50)+(170-82)+(170-43)+(140-43)+(140-24)+(24-16)+(190-16) =642
Advantages of FCFS
Here are some of the advantages of First Come First Serve.
- Every request gets a fair chance
- No indefinite postponement
Disadvantages of FCFS
Here are some of the disadvantages of First Come First Serve.
- Does not try to optimize seek time
- May not provide the best possible service
Learn more in detail: FCFS
2. SSTF (Shortest Seek Time First)
In SSTF (Shortest Seek Time First), requests having the shortest seek time are executed first. So, the seek time of every request is calculated in advance in the queue and then they are scheduled according to their calculated seek time. As a result, the request near the disk arm will get executed first. SSTF is certainly an improvement over FCFS as it decreases the average response time and increases the throughput of the system. Let us understand this with the help of an example.
Example:
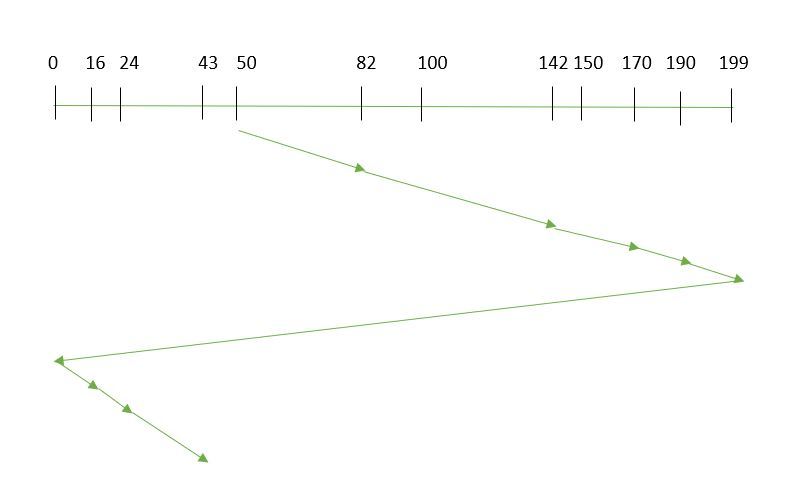
 Shortest Seek Time First
Shortest Seek Time FirstSuppose the order of request is- (82,170,43,140,24,16,190) and current position of Read/Write head is: 50
total overhead movement (total distance covered by the disk arm) =
(50-43)+(43-24)+(24-16)+(82-16)+(140-82)+(170-140)+(190-170) =208
Advantages of Shortest Seek Time First
Here are some of the advantages of Shortest Seek Time First.
- The average Response Time decreases
- Throughput increases
Disadvantages of Shortest Seek Time First
Here are some of the disadvantages of Shortest Seek Time First.
- Overhead to calculate seek time in advance
- Can cause Starvation for a request if it has a higher seek time as compared to incoming requests
- The high variance of response time as SSTF favors only some requests
Learn More in detail: shortest seek time first
3. SCAN
In the SCAN algorithm the disk arm moves in a particular direction and services the requests coming in its path and after reaching the end of the disk, it reverses its direction and again services the request arriving in its path. So, this algorithm works as an elevator and is hence also known as an elevator algorithm. As a result, the requests at the midrange are serviced more and those arriving behind the disk arm will have to wait.
Example:
 SCAN Algorithm
SCAN AlgorithmSuppose the requests to be addressed are-82,170,43,140,24,16,190 and the Read/Write arm is at 50, and it is also given that the disk arm should move "towards the larger value".
Therefore, the total overhead movement (total distance covered by the disk arm) is calculated as
= (199-50) + (199-16) = 332
Advantages of SCAN Algorithm
Here are some of the advantages of the SCAN Algorithm.
- High throughput
- Low variance of response time
- Average response time
Disadvantages of SCAN Algorithm: Long waiting time for requests for locations just visited by disk arm
Learn More in detail: SCAN
4. C-SCAN
In the SCAN algorithm, the disk arm again scans the path that has been scanned, after reversing its direction. So, it may be possible that too many requests are waiting at the other end or there may be zero or few requests pending at the scanned area.
These situations are avoided in the CSCAN algorithm in which the disk arm instead of reversing its direction goes to the other end of the disk and starts servicing the requests from there. So, the disk arm moves in a circular fashion and this algorithm is also similar to the SCAN algorithm hence it is known as C-SCAN (Circular SCAN).
Example:
 Circular SCAN
Circular SCANSuppose the requests to be addressed are- 82,170,43,140,24,16,190 and the Read/Write arm is at 50, and it is also given that the disk arm should move "towards the larger value".
So, the total overhead movement (total distance covered by the disk arm) is calculated as:
=(199-50) + (199-0) + (43-0) = 391
Advantages of C-SCAN Algorithm: Provides more uniform wait time compared to SCAN.
Learn more in detail: C-SCAN
5. LOOK
LOOK Algorithm is similar to the SCAN disk scheduling algorithm except for the difference that the disk arm in spite of going to the end of the disk goes only to the last request to be serviced in front of the head and then reverses its direction from there only. Thus it prevents the extra delay which occurred due to unnecessary traversal to the end of the disk.
Example:
 LOOK Algorithm
LOOK AlgorithmSuppose the requests to be addressed are- 82,170,43,140,24,16,190 and the Read/Write arm is at 50, and it is also given that the disk arm should move "towards the larger value".
So, the total overhead movement (total distance covered by the disk arm) is calculated as:
= (190-50) + (190-16) = 314
Advantages
- Reduced Unnecessary Movement: The disk arm only goes as far as the last request in each direction, avoiding travel to the disk’s physical end (unlike SCAN).
- Faster Response: Less head movement leads to quicker service for requests.
Learn more in detail: LOOK
6. C-LOOK
As LOOK is similar to the SCAN algorithm, in a similar way, C-LOOK is similar to the CSCAN disk scheduling algorithm. In CLOOK, the disk arm in spite of going to the end goes only to the last request to be serviced in front of the head and then from there goes to the other end’s last request. Thus, it also prevents the extra delay which occurred due to unnecessary traversal to the end of the disk.
Example: Suppose the requests to be addressed are-82,170,43,140,24,16,190 and the Read/Write arm is at 50, and it is also given that the disk arm should move "towards the larger value"
 C-LOOK
C-LOOKSo, the total overhead movement (total distance covered by the disk arm) is calculated as
= (190-50) + (190-16) + (43-16) = 341
Advantages:
- Uniform Wait Time: Requests are serviced in a circular manner, so waiting times are more predictable and fair.
- Reduced Head Movement: The arm only goes as far as the last request in one direction, then jumps back, saving time compared to C-SCAN.
Learn more in detail: C-LOOK
7. RSS (Random Scheduling)
It stands for Random Scheduling and just like its name it is natural. It is used in situations where scheduling involves random attributes such as random processing time, random due dates, random weights, and stochastic machine breakdowns this algorithm sits perfectly. Which is why it is usually used for analysis and simulation.
8. LIFO (Last-In First-Out)
In LIFO (Last In, First Out) algorithm, the newest jobs are serviced before the existing ones i.e. in order of requests that get serviced the job that is newest or last entered is serviced first, and then the rest in the same order.
Advantages of LIFO
Here are some of the advantages of the Last In First Out Algorithm.
- Maximizes locality and resource utilization
- Can seem a little unfair to other requests and if new requests keep coming in, it cause starvation to the old and existing ones.
9. N-STEP SCAN
It is also known as the N-STEP LOOK algorithm. In this, a buffer is created for N requests. All requests belonging to a buffer will be serviced in one go. Also once the buffer is full no new requests are kept in this buffer and are sent to another one. Now, when these N requests are serviced, the time comes for another top N request and this way all get requests to get a guaranteed service
Advantages of N-STEP SCAN: It eliminates the starvation of requests completely.
Learn more in detail: N-STEP SCAN
10. F-SCAN
This algorithm uses two sub-queues. During the scan, all requests in the first queue are serviced and the new incoming requests are added to the second queue. All new requests are kept on halt until the existing requests in the first queue are serviced.
Advantages of F-SCAN
- Prevents Arm Stickiness: The head doesn’t get stuck near one area because requests are split into two queues.
- Fairness: All requests in the first queue are guaranteed service before moving to the second, avoiding indefinite delays.
Learn more in detail: F-SCAN
Note: Average Rotational latency is generally taken as 1/2(Rotational latency).
88. Disk Management | Disc Scheduling in Operating System
Visit Course

Explore
Basics
Process Scheduling
Process Synchronization
Deadlock
Multithreading
Memory Management
Kernel & System-Level Concepts
Disk Management
Important Links