Comparison between Conventional& Mecanum Wheels
VS
Overview of wheel types in robotics.
Design features, mechanics, and movement principles.
2.
1. Design &Motion & Kinematics
conventional
• Design: Solid or pneumatic circular wheels
without rollers.
• Motion: Designed for straightforward
forward/backward motion. Rotational motion is
achieved using a differential drive system or
steering mechanisms
• Kinematics: Simple; relies on linear and
angular velocities derived directly from wheel
rotations. 2 or 4 independent drive motors
Mecanum
• Design: Wheels equipped with angled rollers (typically 45°
or 60°) around the rim.
• Motion: Allows omnidirectional movement, including
forward, backward, sideways, and rotation without
changing the robot's orientation.
• Kinematics: More complex; requiring advanced control
algorithms for precise movement. As it requires
understanding force vectors and projecting motion based on
roller geometry.
3.
2. Friction Analysis
conventional
Static and Dynamic Friction: Frictional
force is given by: where:
o : Coefficient of friction
o : Normal force acting on the wheel
Frictional Forces: Primarily along the
direction of motion; turning friction adds
complexity to analysis.
Higher Traction: Higher due to the absence
of rollers, providing strong grip on most
surfaces due to higher normal contact area.
Slippage: slippage is minimal in controlled
environments Skidding occurs during sharp
turns or abrupt braking due to lateral forces.
Mecanum
Force Components: Forces on each roller split into
tangential and normal components. For a roller angled
at α: where:
o : Total force applied
o : Tangential force for motion
o : Roller-induced force
• Frictional Forces: Forces are distributed along the
roller axes, introducing energy loss and requiring precise
calibration.
• Lower Traction: Due to the rollers, contact area with
the ground is reduced compared to conventional wheels.
• Slippage: More prone to slippage, especially on smooth
or inclined surfaces, due to distributed forces through
rollers.
4.
3. Dynamic Analysis
conventional
Torque required for motion: where is
the moment of inertia, and is angular
acceleration.
Power efficiency.
Mecanum
Torque losses due to rollers:
Power efficiency is reduced due to energy
dissipation in rollers.
5.
4. Control SystemComplexity & Kinematics Restrictions:
conventional
• Control Complexity:
Simple control algorithms (PID or
basic control loops, basic trajectory
tracking)
• Forward Kinematics: Straightforward;
uses simple equations for motion along
the x-axis and y-axis. Turning involves a
differential steering model.
• Inverse Kinematics: Easier to calculate,
primarily focused on linear velocity and
angular velocity.
Mecanum
• Control Complexity:
Requires more advanced controllers. (e.g.,
PID with feedforward, model predictive
control).
Precise calibration is critical.
Forward Kinematics: Complex; involves
projecting forces through rollers to achieve
omnidirectional motion.
Inverse Kinematics: Requires matrix inversion;
errors in calibration lead to significant
inaccuracies.
6.
5. Wear andTear & Energy Efficiency & Payload Distribution
conventional
Wear and Tear:
have more uniform wear.
Energy Efficiency:
more efficient due to direct force
transfer.
Payload Distribution:
handle higher loads due to better
traction.
Mecanum
Wear and Tear:
suffer from uneven roller wear.
Energy Efficiency:
lose energy through rollers.
Payload Distribution:
struggle on uneven surfaces.
7.
6. Applications andUse Cases
conventional
Best for outdoor environments or where
straight-line motion is prioritized.
Applications: Delivery robots,
agricultural robots, off-road vehicles.
Mecanum
Ideal for indoor, smooth environments
requiring high maneuverability (e.g.,
warehouses, factories).
Applications: AGVs (Automated Guided
Vehicles), service robots, robots in narrow
aisles.
8.
7. Choosing theRight Option for Our Project
Considering our project focuses on a Warehouse iFollow Robot:
Advantages of Mecanum Wheels: Their ability to move omnidirectionally
simplifies navigation in confined spaces, such as warehouse aisles.
Disadvantages of Mecanum Wheels: Slippage and lower traction may reduce
reliability when carrying a 30 kg load, particularly on less-than-ideal surfaces.
On the other hand, Conventional Wheels:
Offer higher traction and are better suited for handling heavier payloads.
May require more space for turning and might complicate path-planning
algorithms in tight spaces.
9.
Kinematics Derivation ofConventional & Mecanum Wheels
for 4-Wheeled Mobile Robot
Forward Kinematics Derivation.
Inverse Kinematics Derivation.
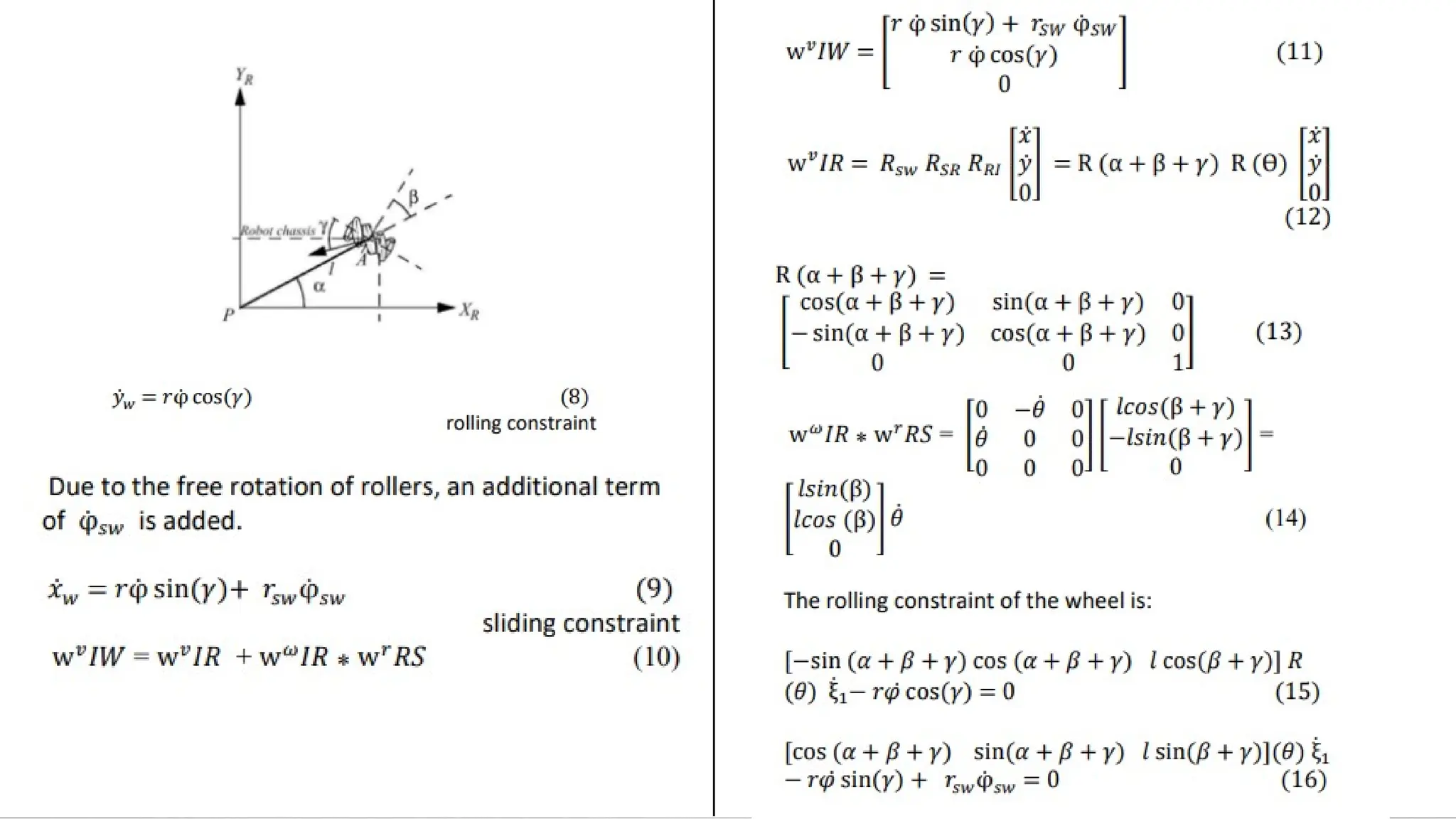
Each wheel velocitydecomposes into two perpendicular components due to
the roller angle (α):
Tangential velocity : Motion parallel to the wheel axis.
Roller velocity
: Motion perpendicular to the wheel axis.
• Using the geometric relationship:
• Wheel Force Decomposition: Each Mecanum wheel's force is decomposed
due to its rollers angled at . This allows contributions to both translational
and rotational motions:
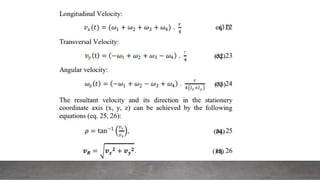
20.
Forawrd Kinematics
• Fora robot with four mecanum wheels arranged
in a rectangular pattern, The contribution of each
wheel to the robot's , and is calculated
considering the roller geometry.
• For desired robot velocities , and , the
wheel angular velocities are computed as:
Inverse Kinematics
21.
Aspect Conventional WheelsMecanum Wheels
Kinematics - Easier to implement
- Lower computation requirements
- Complex; involves force decomposition
- Requires calibration
Terrain
Handling
- Handles uneven terrain better
- More suitable for outdoor use - Best suited for smooth, indoor surfaces
Energy
Efficiency
- More energy-efficient due to fewer
losses
- Energy losses in roller mechanisms
22.
Aspect Conventional WheelsMecanum Wheels
Traction - High traction on most surfaces - Lower traction, prone to slippage
Maneuverability - Limited to linear and rotational motion- Full omnidirectional control
Control
Complexity
- Low complexity - High complexity
Cost Cost-effective - Expensive due to specialized design
23.
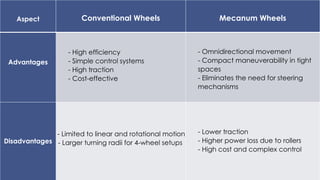
Aspect Conventional WheelsMecanum Wheels
Advantages
- High efficiency
- Simple control systems
- High traction
- Cost-effective
- Omnidirectional movement
- Compact maneuverability in tight
spaces
- Eliminates the need for steering
mechanisms
Disadvantages
- Limited to linear and rotational motion
- Larger turning radii for 4-wheel setups
- Lower traction
- Higher power loss due to rollers
- High cost and complex control