Lecture #2 Robot design
Download as PPTX, PDF4 likes3,060 views

This document provides an overview of industrial robot technology, including: 1) It outlines different robot coordinate systems (Cartesian, cylindrical, spherical) and robot types (SCARA, articulated). 2) It describes the different types of robot joints (prismatic and revolute) and wrist articulations (yaw, pitch, roll). 3) It discusses various drive mechanisms for robot motion including mechanical drives using ball screws or gears, and pneumatic, hydraulic, and electrical systems. It provides examples of speed reducers like harmonic drives and planetary gearheads.
















Lecture #2 Robot design
- 1. Unit 121: Engineering Industrial Robot Technology Lecture (2) Robot Design
- 2. Session Outline: •Manipulator coordinate systems •Wrist articulations •Drive mechanisms •Speed reducers/ gearheads
- 3. Manipulator coordinate systems Cartesian Cylindrical Spherical Selective Compliant Assembly Robot Arm (SCARA) Articulated Robot
- 4. Joint Types 1- Prismatic joint where the pair of links makes a translational displacement along a fixed axis. In other words, one link slides on the other along a straight line. Therefore, it is also called a sliding joint. 2- Revolute joint where a pair of links rotates about a fixed axis. This type of joint is often referred to as a hinge, articulated, or rotational joint.
- 5. Cartesian Coordinates Cartesian coordinate robot has three prismatic joints, corresponding to three axes denoted x, y , and z.
- 6. Cylindrical Coordinates The cylindrical robot consists of one revolute joint and two prismatic joints, with r, Θ and z representing the coordinates of the end-effecter.
- 7. Spherical Coordinates the spherical robot has two revolute joints denoted Θ and Φ and one prismatic joint denoted r.
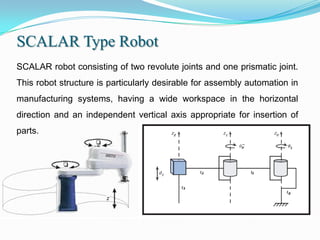
- 8. SCALAR Type Robot SCALAR robot consisting of two revolute joints and one prismatic joint. This robot structure is particularly desirable for assembly automation in manufacturing systems, having a wide workspace in the horizontal direction and an independent vertical axis appropriate for insertion of parts.
- 9. Articulated Robot Articulated robot or an elbow robot, consists of all three revolute joints, like a human arm. This type of robot has a great degree of flexibility and versatility, being the most standard structure of robot manipulators.
- 10. Wrist articulations Yaw Pitch Roll Degrees of freedom
- 11. Wrist articulations Translation: 1- Moving up and down 2- Moving left and right 3- Moving forward and backward Rotation: 4- Tilting forward and backward (pitching); 5- Turning left and right (yawing); 6- Tilting side to side (rolling)
- 12. Drive mechanisms Mechanical (ball screws, chain/belt, gears) Pneumatic Hydraulic Electrical
- 13. Mechanical (ball screws, chain/belt, gears) A ball screw is a mechanical linear actuator that translates rotational motion to linear motion with little friction. A threaded shaft provides a helical raceway for ball bearings which act as a precision screw. Vid. 1 Vid. 2
- 14. Pneumatic System is a section of technology that deals with the study and application of pressurized gas to effect mechanical motion.
- 15. Advantages of pneumatics Simplicity of Design And Control Machines are easily designed using standard cylinders & other components. Reliability Pneumatic systems tend to have long operating lives and require very little maintenance. Because gas is compressible, the equipment is less likely to be damaged by shock. The gas in pneumatics absorbs excessive force, whereas the fluid of hydraulics directly transfers force. Storage Compressed gas can be stored, allowing the use of machines when electrical power is lost.
- 16. Hydraulic System A hydraulic drive system is a drive or transmission system that uses pressurized hydraulic fluid to drive hydraulic machinery
- 17. Speed reducers/ gearheads Harmonic Cycloidal parallel shaft spur gear Planetary
- 18. Cycloidal Drive http://www.darali.com/page17.html