Obstacle Avoiding Robot Using Micro Controller

Robotics is a branch of science that deals with Mechanical, Electrical and Software fields. Robots are the machines that are used in our day-to-day to life to reduce men power and work accurately without any distortions. Robots can be classified into two different sections basing upon their skills as Automated and Manual. Obstacle detector is a Automated robot which itself recognizes the obstacle in its path and moves in free direction. Robot detects the obstacle by using two IR Sensors placed in front. The IR sensors are placed on left and right side of the robot through which continuous Infrared radiation is emitted for detection of obstacles in the path. These IR Sensors are connected to a controlling element AT89c51 µc. When a obstacle is placed in the path of robot IR beam is reflected to the sensor from the obstacle. On detecting obstacle in the path sensor sends 0 volts to µc. This 0 voltage is detected by Microcontroller which avoids the obstacle by taking left or right turn. Similarly if the sensor sends +5v to Microcontroller, the Microcontroller assumes it as clear path and makes the robot to move in straight. Two motors namely right motor and left motor are connected to Motor driver IC (L293D). L293D is interface with Microcontroller. Microcontroller sends logic 0 & logic 1 as per the programming to driver IC which makes motors to rotate in clockwise and anticlockwise direction. Wheels attached to the motors rotate accordingly with the motor shaft causing in the moment of the robot by wheels. In front portion of the robot a free wheel is attached to move the robot easily in any direction as per the requirement. A 12Volts DC battery is attached to the circuit. As the microcontroller and sensors requires only 5v, set of resistors and capacitors are used to supply 5v DC to them. Power Management System is not maintained in the circuit as the battery can be removed after the usage of robot. So it does not cause any loss in the power of battery. This type of robots has multiple applications in various fields. They can be used to know the strength of the opposite army in defense system. They can be used as floor and wall cleaners. They are used in automated GPS vehicles to calculate the moment of the vehicle overhead. These robots are easy to construct and cheaper in cost with long durability.





















































More Related Content
What's hot (20)
Similar to Obstacle Avoiding Robot Using Micro Controller (20)


















More from Electronics - Embedded System (10)










Recently uploaded (20)




















Obstacle Avoiding Robot Using Micro Controller
- 2. INTRODUCTION Robot is a computer-controlled machine that is programmed to move manipulate objects, and accomplish work while interacting with appropriate sensors and actuators mounted on it for carrying out the desired operations. In this robots Infra red pairs are used for sensing the obstacles and IR leads are used for transmitting and receiving infra red rays. Using infrared rays robots will find out the obstacles present in front of them and move right or left from their current position and move forward.
- 3. Obstacle detection robots are nothing but self thinking robots which can take decisions itself using programmed brain without any guidance from human beings. There are two types of robots in one type robots perform action as we give signals remotely where as second type of robots are self thinking robots which can detect obstacle and move forward. This project is of second robots.
- 4. Graphical Block diagram: Obstacle Avoiding Robot
- 6. Interfacing circuit of Robot
- 7. OBSTACLESENSORS The obstacle senor is used to avoid the robot from the clash to any external devices (or) that is like walls, any obstacle which comes in its way. Here we are using the IR communications .the transmitter and the receiver parts. The transmitter produces the IR rays and they are received by the receiver section.
- 8. Architecture of 8051 Microcontroller Features RAM 128bytes ROM 4K I/O 4 ports Timer 2 Interrupt 6
- 9. Pin diagram of IC AT89C51
- 10. MANUFACTURE S OF MICRO CONTROLLER Atmel Dallas Semiconductor Intel Microchip National Semiconductor Texas Instruments
- 11. H-BRIDGE MOTOR DRIVER The name "H-Bridge" is derived from the actual shape of the switching circuit which controls the motion of the motor. It is also known as "Full Bridge". Basically there are four switching elements in the H-Bridge as shown in the figure below.
- 12. Truth Table High Left High Right Low Left Low Right Description On Off Off On Motor runs clockwise Off On On Off Motor runs anti-clockwise On On Off Off Motor stops or decelerates Off Off On On Motor stops or decelerates
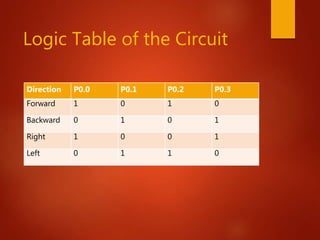
- 13. Logic Table of the Circuit Direction P0.0 P0.1 P0.2 P0.3 Forward 1 0 1 0 Backward 0 1 0 1 Right 1 0 0 1 Left 0 1 1 0
- 14. Electrical motor An actuator which converts electrical signal into rotation”.
- 15. Why only DC motor? We all know that AC motors are normally constant speed motors. Variable speed ac drives uses very complex circuitry because the ac motor speed is varied by the frequency variation and is not quite easy. Stepper motor gives calculated angle of rotation they take number of steps in one revolution they cannot be stopped in between the step. Also they are not constant running motors their use is limited to the area where you want calculated steps to be taken such as printers, plotters, and other similar applications.
- 16. Advantages of DC motor:- Dc motors are widely used in industry where wide range of variable speed is required. High starting torque & easy speed variations are some of the other characteristics of DC motors.
- 17. ALGORITHM Step1: Initialization of I/O ports. Step2: Set Direction as Forward/ Backward/ Left/ Right. Step3: check if any obstacle is detected according to that change the motion of Robot. If no then Robot will goes in forward direction. Step4: Wait for some time. Step5: go to step 3 to repeat the process. Step7: Wait for some time. Step 8: End
- 18. FLOW CHART
- 19. Advantages & Disadvantages Advantages : Whenever robot senses any obstacle automatically diverts its position to left or right and follows the path without human guidance. The programming of the microcontroller is easy. It is a low cost circuit. Disadvantages : It is time consuming project. It is use for short distance only. It is not recommended to keep the range very long because this would cause the ROBOT to keep moving forward and backward as it senses any obstacle, even far away from it. It is not in human control
- 20. Applications Obstacle sensing robot can be applied at the toys where small children will play. It can used for the army application. We can apply number pairs of IR pairs for the safe direction control of the robot. In Mines.
- 21. FUTURE ASPECTS: We can extend this project with wireless technology by IR (or) RF. This robot can be used for pick and place the required object by giving directions to the robot but IR pair should be replaced depending upon the application. By doing extra things, it can be use in Army application.
- 22. Photographs:
- 23. References BOOKS: 1.The 8051 microcontroller & Embedded System ( Mazidi , Pearson Education ,III edition) 2.Mechatronics Principle and Applications (Godfrey Onwobolu, Pearson Education) 3.Embedded System ( Rajkamal, Pearson Education, II edition) 4. .Introduction to Robotics (Vikram Kapila, Pearson Education,IV Edition)
- 24. Website: http://mechatronics.poly.edu http://www.roboticswikipedia.com http://www.mecatronicswikipedia.com http://www.datasheets.com http://www.J2RScientific.com http://www.expresspcb.com http://www.kiel51.com http://www.8051microcontroller.com